aruco:: detectMarkers не находит истинных краев маркеров
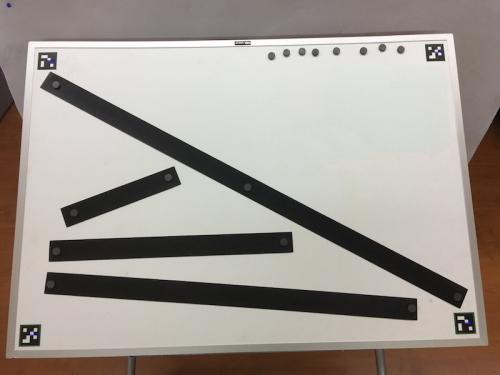
Я использую маркеры ArUco для коррекции перспективы и вычисления размеров изображения. На этом изображении я знаю точное расстояние между внешними краями маркеров и использую его для вычисления размеров черных прямоугольников.
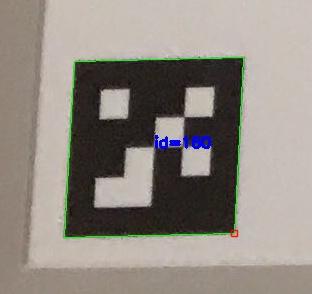
Моя проблема заключается в том, что aruco::detectMarkers не всегда идентифицирует истинные края маркеров (как показано на детальном изображении). Когда я корректирую перспективу на основе углов маркеров, это вызывает искажение, которое влияет на вычисления размеров объектов в пространстве. изображение.
Есть ли способ повысить точность обнаружения краев aruco::detectMarkers?
Вот уменьшенная фотография всей доски:
Вот деталь нижнего левого маркера, показывающая неточность обнаружения края:
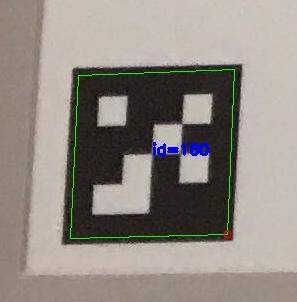
Вот деталь верхнего правого маркера, показывающая точное обнаружение края того же идентификатора маркера:
Это трудно увидеть в этом уменьшенном изображении. но верхний левый маркер точен, а нижний правый маркер неточен.
Моя функция, которая вызывает detectMarkers:
bool findMarkers(const Mat image, Point2d outerMarkerCoordinates[], Point2d innerMarkerCoordinates[], Size2d *boardSize) {
Ptr<aruco::Dictionary> theDictionary = aruco::getPredefinedDictionary(aruco::DICT_4X4_1000);
vector<vector<Point2f> > markers;
vector<int> ids;
aruco::detectMarkers(image, theDictionary, markers, ids);
aruco::drawDetectedMarkers(image, markers, ids);
return true; //There's actually more code here that makes sure there are four markers.
}
1 ответ:
Проверка необязательного
detectorParametersаргумента кdetectMarkersпоказала параметр под названиемdoCornerRefinement. Его описание - "делать субпиксельное уточнение или нет". Поскольку ошибка, которую я вижу, больше пикселя, я не думал, что это применимо к моей ситуации. Я все равно попробовал и экспериментировал со значениемcornerRefinementWinSizeи обнаружил, что это действительно решает мою проблему. Теперь я думаю, что "пиксель" в смысле ArUco-это размер одного из квадратов внутри маркера, а не изображения пиксель.Модифицированный вызов
detectMarkers:bool findMarkers(const Mat image, Point2d outerMarkerCoordinates[], Point2d innerMarkerCoordinates[], Size2d *boardSize) { Ptr<aruco::Dictionary> theDictionary = aruco::getPredefinedDictionary(aruco::DICT_4X4_1000); vector<vector<Point2f> > markers; vector<int> ids; Ptr<aruco::DetectorParameters> detectorParameters = new aruco::DetectorParameters; detectorParameters->doCornerRefinement = true; detectorParameters->cornerRefinementWinSize = 11; aruco::detectMarkers(image, theDictionary, markers, ids, detectorParameters); aruco::drawDetectedMarkers(image, markers, ids); return true; //There's actually more code here that makes sure there are four markers. }Успех!