Рекурсивный алгоритм первого поиска глубины (DFS) в C++
Я реализовал граф в классе Graph как матрицу смежности со всеми необходимыми функциями для доступа и изменения ее, те, которые мне нужны в алгоритме DFS
// for a Graph x, node v
string x.get_node_value(v) //returns the the label of the node
queue x.neighbors(v) //returns a queue with the adjacent nodes to the node v (nodes index on the graph starts from 1)
Теперь я попытался реализовать рекурсивный DFS, но он всегда застревает в какой-то точке, он никогда не рекурсирует назад после того, как он снова вызывает себя, поэтому он работает и находит цель, если он существует на своем пути, прежде чем он достигнет конечного узла, но затем он останавливается после достижения конечного узла
Он отслеживает узлы, указывая цвета, непросмотренный узел-белый, текущий узел-серый, выполненный узел (посещенный и все дети посещены) - черный.
Вот функция запуска:
int Search::DFSr(const std::string search_key, Graph& x, int starting_node){
Color * visited_nodes = new Color[x.size()];
for(int i=0; i<x.size(); i++){visited_nodes[i] = WHITE;}
bool goal_f = 0;
int goal = DFSUtil(search_key, x, starting_node, visited_nodes, goal_f);
if(goal_f) return goal;
else return -1;
}
И вот функция посещения:
int Search::DFSUtil(std::string search_key, Graph& x, int current_node, Color(visited_nodes)[], bool& goal_f){
visited_nodes[current_node-1] = GREY; //-1 because array index start from 0 but nodes index on the graph starts from 1
if(x.get_node_value(current_node) == search_key ){
goal_f = 1;
return current_node;
}
else{
std::queue <int> childs = x.neighbors(current_node);
while(!childs.empty() && !goal_f){
if(visited_nodes[childs.front()-1] == WHITE){
return DFSUtil(search_key, x, childs.front(), visited_nodes, goal_f);
}
childs.pop();
}
visited_nodes[current_node-1] = BLACK;
}
}
Протестировал его на этом графике:
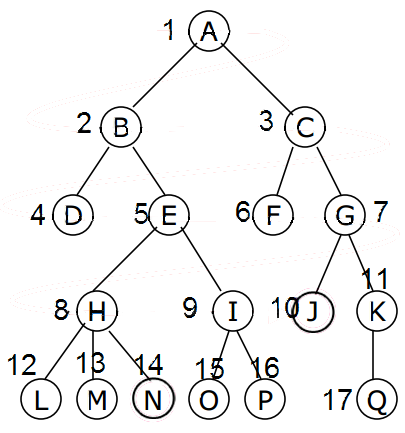
Он находит цель только в том случае, если она была в пределах A, B или D, в противном случае он обычно выходит без ошибок
1 ответ:
Следующее изменение кода должно помочь:
int Search::DFSUtil(std::string search_key, Graph& x, int current_node, Color(visited_nodes)[], bool& goal_f){ visited_nodes[current_node-1] = GREY; //-1 because array index start from 0 but nodes index on the graph starts from 1 if(x.get_node_value(current_node) == search_key ){ goal_f = 1; return current_node; } else{ std::queue <int> childs = x.neighbors(current_node); while(!childs.empty() && !goal_f){ if(visited_nodes[childs.front()-1] == WHITE){ int result = DFSUtil(search_key, x, childs.front(), visited_nodes, goal_f); if( result >= 0 ) { return result; } } childs.pop(); } visited_nodes[current_node-1] = BLACK; } return -1; }Вы можете дополнительно удалить переменную goal_f из параметров и операторов, связанных с ней. Возвращаемое значение является достаточным.
EDIT: проблема была в этой строке кода
return DFSUtil(search_key, x, childs.front(), visited_nodes, goal_f);Здесь функция возвращалась, даже если цель не была найдена. Так что оставшиеся (в очереди) соседи не посещались. Исправление делает функцию возвращаемой только в том случае, если цель достигнута. В исправлении также есть оператор "return -1" в конце функции, который указывает, что функция завершилась, не достигнув цели.
Для оценки логики кода, памяти и читабельности, а также предложений по лучшим практикам вы можете разместить свой код здесь: https://codereview.stackexchange.com/