Что именно представляют размер и отклик в характерной точке прибоя?
Я использую OpenCV 2.3 для обнаружения и сопоставления ключевых точек. Но я немного запутался с параметрами size и response, заданными алгоритмом обнаружения. Что именно они означают?
Основываясь на руководстве OpenCV, я не могу понять:
float size: диаметр значимой ключевой точки окрестности
float response: отклик, которым обладают наиболее сильные ключевые точки был выбран. Может использоваться для дальнейшей сортировки или подсчетов
Я думал, что лучше всего было бы отслеживать точку с самым высоким откликом, но, похоже, это не так. Так как же я мог подсчитать набор ключевых точек, возвращаемых детектором прибоя, чтобы сохранить только лучший с точки зрения отслеживаемости?
2 ответа:
Размер и отклик
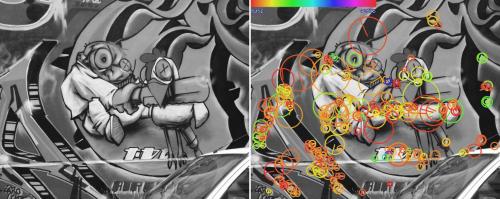
SURF-это детектор больших двоичных объектов, короче говоря, размер объекта - это размер самого большого двоичного объекта. Чтобы быть более точным, возвращаемый размер OpenCV равен половине длины аппроксимированного оператора Гессена. Размер также известен как масштаб, это связано с тем, как работают детекторы больших двоичных объектов, то есть функционально равны сначала размытию изображения с помощью гауссовского фильтра на нескольких масштабах, а затем понижению дискретизации изображений и, наконец, обнаружению больших двоичных объектов с фиксированным размером. Смотрите: изображение ниже показывает размер прибоя особенности. Размер каждого элемента равен радиусу нарисованного круга. Линии, идущие от центра объектов к окружности, показывают углы или ориентации. На этом изображении сила отклика фильтра обнаружения больших двоичных объектов имеет цветовую кодировку. Вы можете видеть, что большинство обнаруженных признаков имеют слабую реакцию. (смотрите полноразмерное изображение здесь)
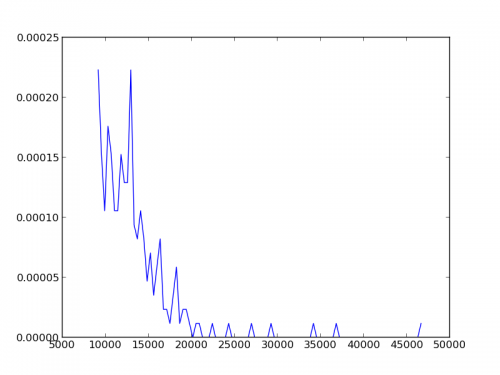
Эта гистограмма показывает распределение отклика сильные стороны функций на приведенном выше изображении:
Какие функции нужно отслеживать?
Самый надежный трекер функций отслеживает все обнаруженные функции. Чем больше возможностей, тем больше надежности. Но отслеживать большое количество объектов нецелесообразно, так как часто мы хотим ограничить время вычислений. Количество функций для отслеживания часто должно быть эмпирически настроено для каждого приложения. Часто изображение делится на регулярные подобласти и в каждой из них n сильнейших особенности сохраняются для отслеживания. n обычно выбирается таким образом, что в общей сложности обнаруживается около 500~1000 объектов на кадр.
Ссылки
Чтение статьи журнала, описывающей SURF , определенно даст вам хорошее представление о том, как это работает. Просто постарайтесь не застревать в деталях, особенно если ваш фон не находится в машинном/компьютерном зрении или обработке изображений. Детектор прибоя может показаться чрезвычайно новым на первый взгляд, но вся идея заключается в оценке Гессена оператор (хорошо зарекомендовавший себя фильтр) использует интегральные изображения (которые использовались другими методами задолго до серфинга). Если вы хотите понять серфинг очень хорошо, и вы не знакомы с обработкой изображений, вам нужно вернуться и прочитать некоторые вводные материалы. Недавно я наткнулся на новую и бесплатную книгу , Глава 13 которой содержит хорошее и краткое введение в обнаружение признаков. Не все сказанное там технически правильно, но это хорошая отправная точка. здесь Вы можете найдите еще одно хорошее описание серфинга с несколькими изображениями, показывающими, как работает каждый шаг. На этой странице вы видите следующее изображение:
Вы можете видеть белые и черные капли, это те капли, которые SURF обнаруживает в нескольких масштабах и оценивает их размеры (радиус в коде OpenCV).
"размер" - это размер области, охватываемой дескриптором в исходном изображении (он получается путем понижающей дискретизации исходного изображения в пространстве масштабирования, следовательно, он изменяется от ключевой точки к ключевой точке в зависимости от их масштаба).
"репонс" - это действительно показатель того," насколько хороша " (грубо говоря, с точки зрения угла) точка.
Хорошие точки стабильны для статического извлечения сцен (это основная цель дескрипторов SIFT / SURF). В случае с отслеживая, вы можете иметь хорошие точки, появляющиеся, потому что отслеживаемый объект находится на хорошо сформированном фоне, наполовину в тени... затем исчезает, потому что это состояние изменилось (изменение света, окклюзия...). Так что нет никакой гарантии для отслеживания задач, что хорошая точка всегда будет там.